Deep Blue Robotics Update: Saturday, January 14
Prototyping:
Most of the team resumed work on their prototypes today. Throughout the day, each prototype team made adjustments to their designs and recorded measurements to test the effectiveness of each.
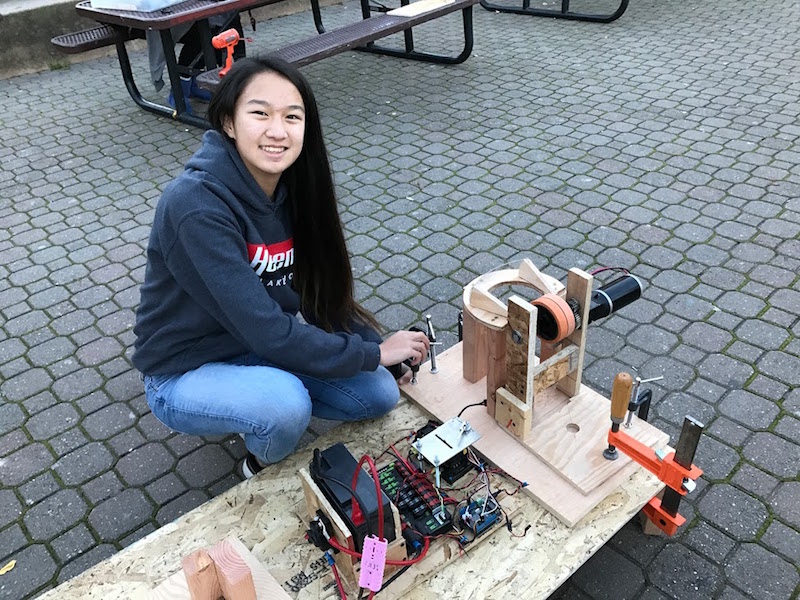
Shooter: The shooter team made adjustments to the mechanism to increase compression to improve consistency in shots. The result: the shooter now can shoot consistently 15 feet in the air and make shots from ~1 foot away with 40% accuracy. Keep up the great work!
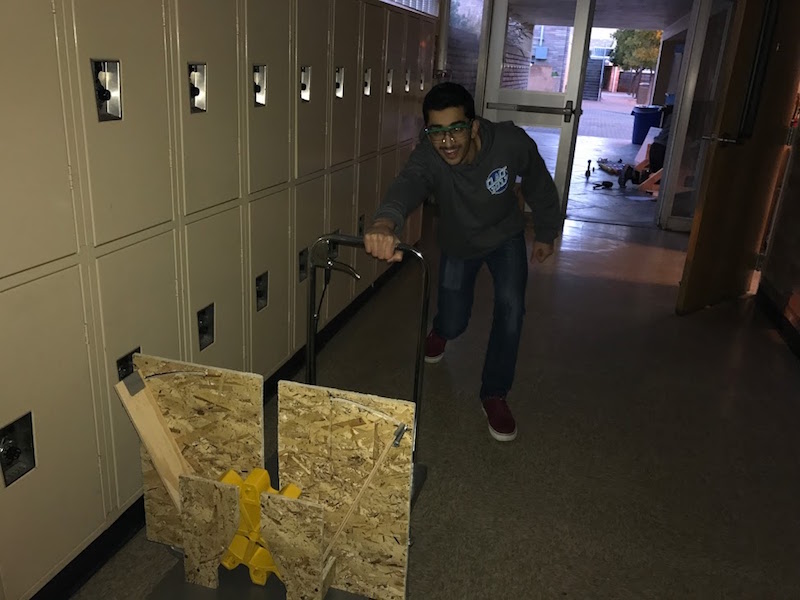
Gear: Today, the gear mechanism prototype team attached their prototype to a cart to test driving w/o drive train. Testing involved moving the cart at varying speeds and angles and observing how the affected the mechanism’s ability to put the gear onto a peg. The cart was meant to simulate the motion of our robot’s drivetrain.
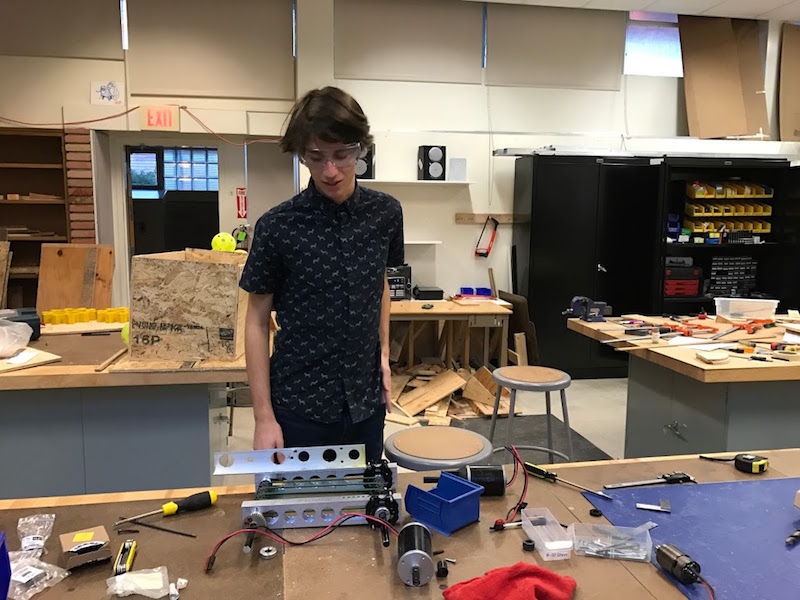
 Indexer: The Indexer prototyping team adjusted the mechanism to make it more similar to the way it will look on the actual robot. The team attached a gear box to the belt so that they can test the mech w/o a hand drill and measure the current drawn.
Indexer: The Indexer prototyping team adjusted the mechanism to make it more similar to the way it will look on the actual robot. The team attached a gear box to the belt so that they can test the mech w/o a hand drill and measure the current drawn.
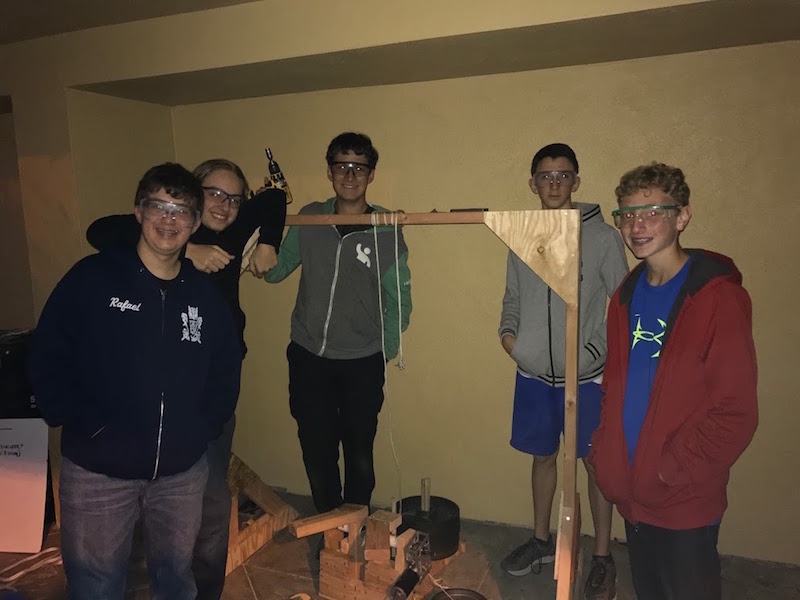
Climber: The Climber team was busy today replacing the main gear with a full gearbox and making other improvements to their prototype. On a 115-pound weight test, the mechanism sustained structural damage in the center beam. However, after repairing the mechanism, it successfully lifted 140 pounds – 20 more than the FRC weight limit! 140lb test successful.
Fuel Hopper: The fuel hopper team spent the day assembling the box to fit the dimensions of the robot. This included making measurements, cutting wood, and screwing the wood together in the shape of the box.

Design:
Programmers: A busy day for the programmers, the programming team worked on preliminary code structure, presented their work and received feedback. The team decided they would have to restructure several parts of the code.
 CAD: The CAD team completed the preliminary design for the full robot and made adjustments to the completed preliminary design for the drive train. After completing, the team presented their work to the leadership team and received feedback on their designs.
CAD: The CAD team completed the preliminary design for the full robot and made adjustments to the completed preliminary design for the drive train. After completing, the team presented their work to the leadership team and received feedback on their designs.

Design Reviews:
There were 2 design review meetings.
At the initial review of the preliminary robot design, Thierry and Ana described how the various subsystems will fit together, interface with the game and the operator, and what the requirements are for each subsystem. Mentors and subteam leads raised issues that need to be addressed.
At the initial review of the detailed mechanical drivetrain design, Eric presented the CAD models of the drivetrain and bumpers and mentors and subteam leads raised issues that need to be addressed before fabrication.
So What is this Robot?

GAME RULES:

Basic Game Rules:
Alliances of three robots each will power their airship by shooting fuel(wiffle) balls into the boiler goals, collecting large gears to power rotors on the ship, and climb a rope at the end of the game.
Game Animation
OUR ROBOT:
ALL BOT: Our robot will aim to perform all three main actions to receive points: shooting, climbing, and gear collecting.
Mechanisms: Our robot will have 6 main mechanisms:
-Fuel Ball Ground Intake
-Gear Intake/placement
-Shooter
-Fuel Storage/Hopper
-Fuel Indexer/Feeder
-Climber
FUN FACT:
The Treaty of Paris was signed on January 14th, 1784: Only 233 Years Ago! WOW!